



船舶姿态仪
规格型号:
其他说明:
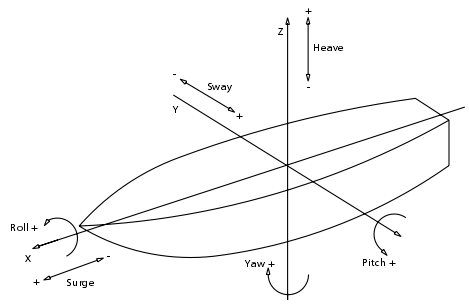
为满足水文和海洋部门的需要,SMC研发出了移动传感器IMU range。IMU range在任何气候条件下,从小型水上工务船至大型油轮,在动态环境下均可提供高精度的移动测量数据。
SMC IMU使用固态陀螺仪和加速计来提供实时的移动测量,即使在加速期间也保证了高精度的动态测量。RS232或RS422输出RS232速率,头文件的输入帮助船体转向。高质量的金属钛设计,结构和组装,使IMU在最苛刻的海洋环境中的可靠性极高。

每台SMC IMU都经过独立校准和翻转、偏移和升降、以及任意方向加速等测试,内置一台可控环境温度至0~55℃的校准器。
关键技术参数:
Ø 横摇和纵摇动态精度0.03°(RMS)
Ø 5cm或5%平错
Ø 速度/加速度
Ø 速度输入格式:RMC,RMA,VTG,VBV,VHW
Ø 头文件输入格式:NMEA 0183,HDT,HDG
Ø 多种行业协议的NMEA
Ø 两年质保


|
技术参数 |
IMU-106 |
IMU-107 |
IMU-108 |
|
横摇/纵摇(翻转/俯仰) |
N/A |
是 |
是 |
|
加速(X,Y,Z) |
N/A |
是 |
是 |
|
升降(平错) |
是 |
N/A |
是 |
|
性能 |
|
||
|
静态角度精度 |
N/A |
0.02°RMS |
0.02°RMS |
|
动态角度精度@翻转和俯仰同时±5° |
N/A |
0.03°RMS |
0.03°RMS |
|
角度分辨率 |
N/A |
0.001° |
0.001° |
|
升降(平错)分辨率 |
0.01m |
N/A |
0.01m |
|
翻转/俯仰角度范围 |
±30° |
±30° |
±30° |
|
升降(平错)范围 |
N/A |
±10m |
|
|
升降(平错)精度 |
5cm或5% |
N/A |
5cm或5% |
|
加速度精度 |
N/A |
0.01m/s2RMS |
0.01m/s2RMS |
|
通讯 |
|
||
|
IMU配置软件 |
IMU提供基于windows操作系统的SMC配置软件,,可进行现场设置 |
||
|
输出信号协议 |
多种用户可选的输出协议如ASCII NMEA及二进制 |
||
|
通讯界面 |
输出RS422与RS232。远程整流器模拟(可选);2个RS232外部输入(不适用于所有模型);速度输入格式RMC,RMA,VTG,VBV,VHW;头文件输入格式HDT,HDG |
||
|
物理参数 |
|
||
|
IMU-10x(宽*高)尺寸 |
管直径Ø89,安装板直径Ø134,轮缘Ø110)*127 |
||
|
重量 |
约2kg |
||
|
外壳材料 |
金属钛 |
||
|
工作环境 |
|
||
|
温度(最大绝对值) |
0℃~+55℃(-10°~65°);保存温度-40℃~+65℃ |
||
|
装载方位 |
水平或垂直安装(出厂设置) |
||
|
需要功率 |
12-30V直流;2W |
||
|
工作时间(MTBF)(计算值) |
50,000小时 |
||
|
深度率 |
IP64(标准);IP68 30米深度率(可选) |
||
|
标准 |
遵从IEC 60945 |
||
|
质保&维护 |
|
||
|
质保 |
两年有限的硬件&软件质保 |
||
|
维护 |
免费技术&硬件维护 |
||
|
附带配件 |
|
||
|
连接盒 |
多个输入输出连接线,包括10米长线 |
||

